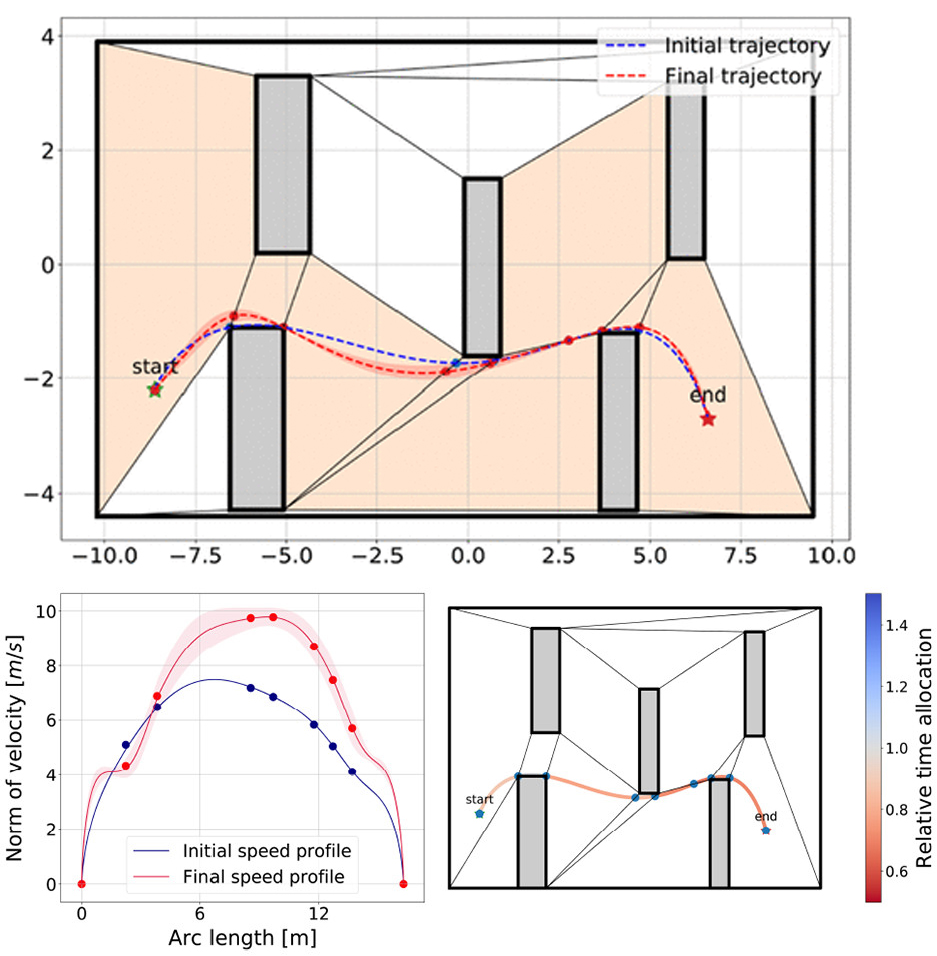
MIT : un algorithme pour optimiser le parcours d'un drone en présence d'obstacles - Helicomicro
Par un écrivain mystérieux
Last updated 24 juillet 2024

Archives des News - Page 112 à 597 - Helicomicro
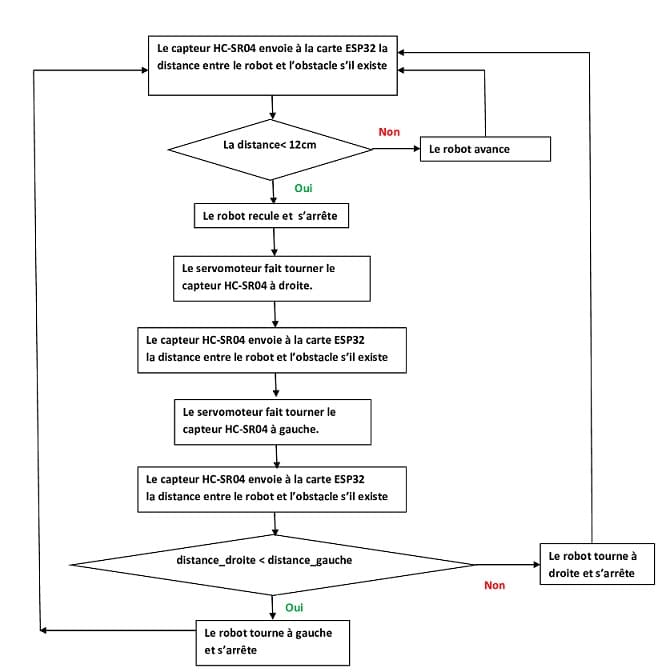
Construction d'un robot commandé par ESP32 qui détecte et évite

Geelang Ligo78X Pro, la version analogique - Helicomicro
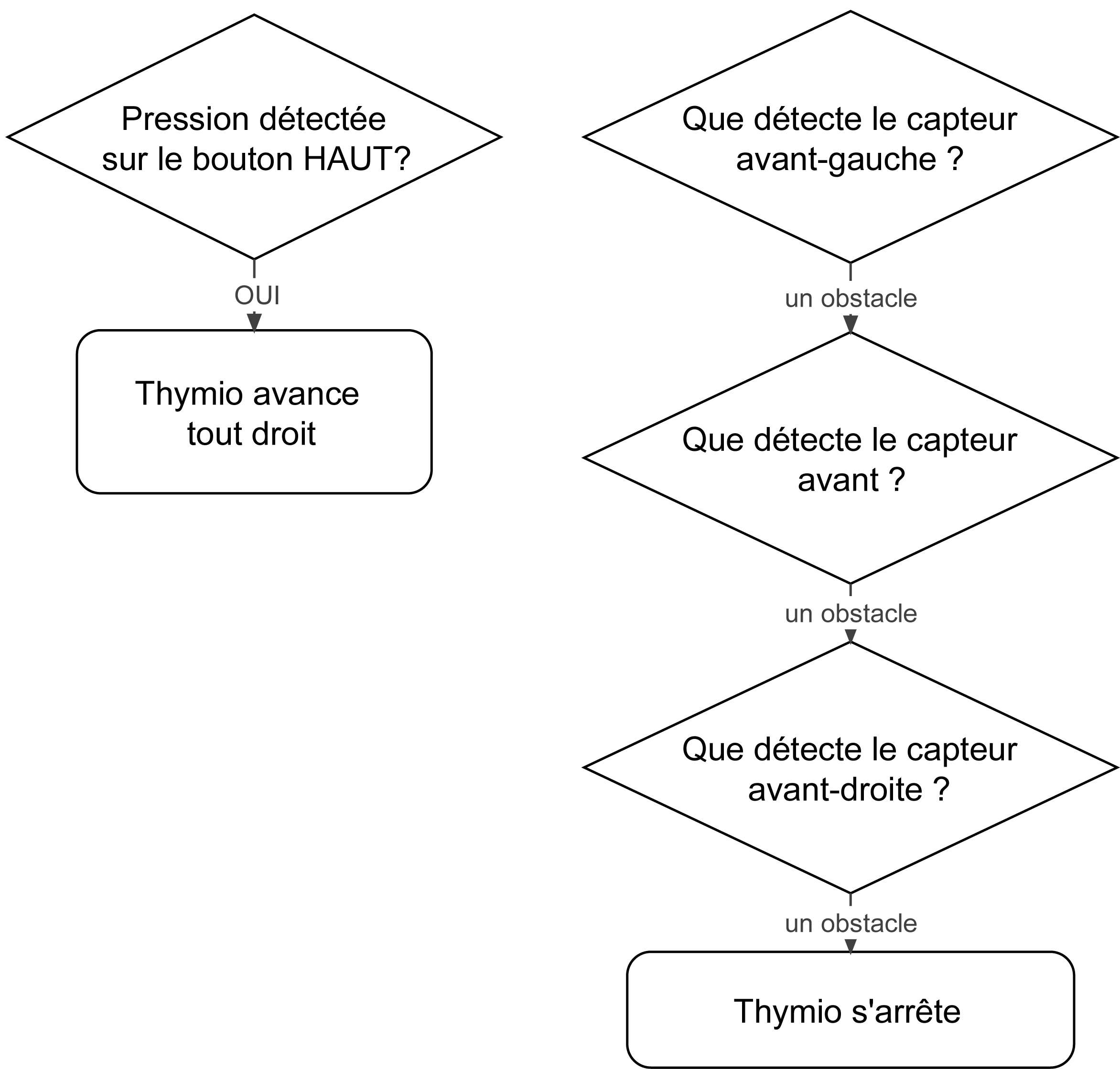
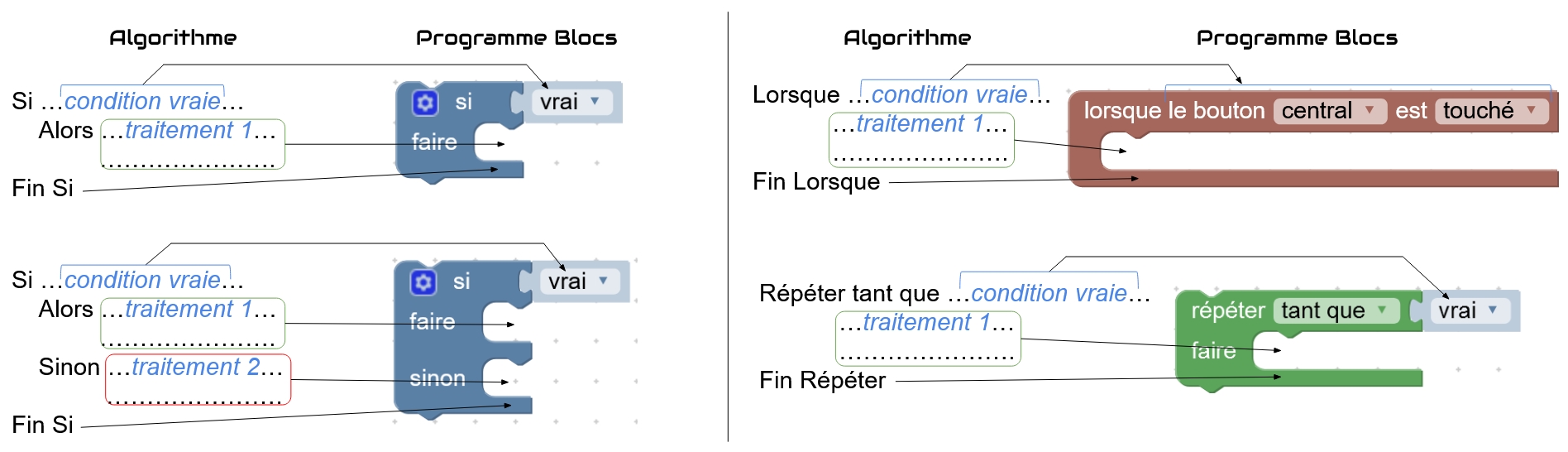
Projet « Robotique » – Séance 3 Programmer un évitement d'obstacle

Algorithmes de gestion pour un drone ultra-maniable en Open source
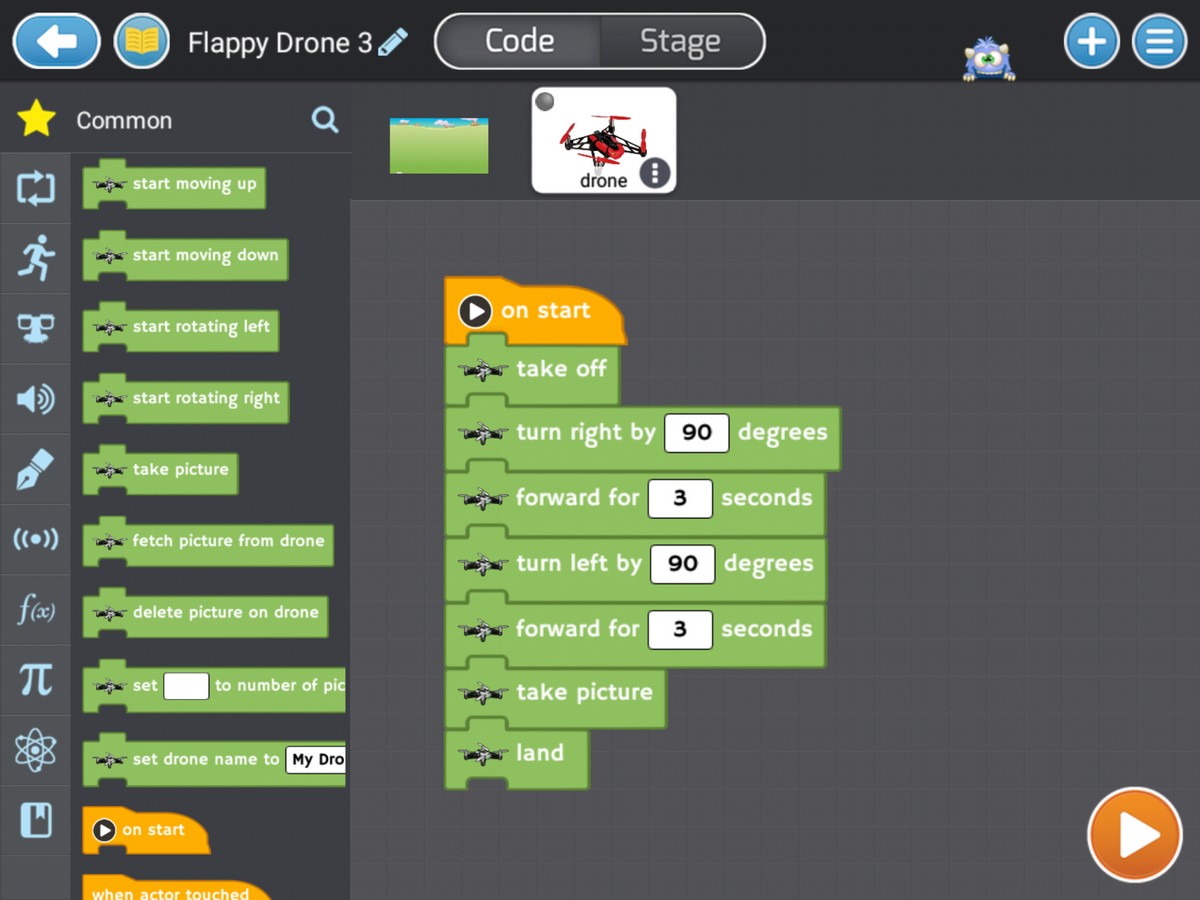
Exemples de projets Cycle 4

PDF) Optimisation de plan de vol d'un drone faisant un cycle

Un drone ultramaniable grâce à un algorithme
et Figure 76 montrent une simulation de navigation pour les robot

Drone Professionnel avec évitement d'obstacles visuels, Drone GPS
Etape 3 - Vérification des performances de Thymio : distance de

4-L'algorithme de planification de trajectoires multi-robots à
Recommandé pour vous
 Pilotage de drone 6/16 ans - Lyon 69 - Atelier Enfant Lyon 1er14 Jul 2023
Pilotage de drone 6/16 ans - Lyon 69 - Atelier Enfant Lyon 1er14 Jul 2023 Kids Drone Parcours / Ars Electronica Futurelab, Become a p…14 Jul 2023
Kids Drone Parcours / Ars Electronica Futurelab, Become a p…14 Jul 2023- LUDyLAB - ➡️ [RÉSERVE TA SESSION DRONE DÈS MAINTENANT SUR 😎 Toi aussi viens au LUDyLAB et deviens dresseur de drones 🛸 Sur un parcours ludique et guidé par un instructeur14 Jul 2023
 animation drone, initiation pilotage drone, animations commerciales originales, drone d'initiation - UniversalDrone14 Jul 2023
animation drone, initiation pilotage drone, animations commerciales originales, drone d'initiation - UniversalDrone14 Jul 2023 FFAM - Fédération Française d'Aéromodélisme14 Jul 2023
FFAM - Fédération Française d'Aéromodélisme14 Jul 2023 Eté : lieux inspirants pour vos réunions de travail dans les Mauges14 Jul 2023
Eté : lieux inspirants pour vos réunions de travail dans les Mauges14 Jul 2023 Dimanche 4 juin 2017 : les Champs-Elysées accueillent la seconde édition du Paris Drone Festival - Sciences et Avenir14 Jul 2023
Dimanche 4 juin 2017 : les Champs-Elysées accueillent la seconde édition du Paris Drone Festival - Sciences et Avenir14 Jul 2023 Dordogne : il fait découvrir le monde du drone au bord du Céou14 Jul 2023
Dordogne : il fait découvrir le monde du drone au bord du Céou14 Jul 2023 Putting Green Aérien De Vue De Longueur De Drone Et Un Superbe Parcours De Golf De Gazon Banque De Vidéos - Vidéo du herbe, zone: 18857502014 Jul 2023
Putting Green Aérien De Vue De Longueur De Drone Et Un Superbe Parcours De Golf De Gazon Banque De Vidéos - Vidéo du herbe, zone: 18857502014 Jul 2023 Prestataire drone / évènementiel parcours ludique / Photo Vidéo Montage /14 Jul 2023
Prestataire drone / évènementiel parcours ludique / Photo Vidéo Montage /14 Jul 2023

Tu pourrais aussi aimer
 Castrol Edge FS 5W30 Engine Oil A3/B4 5L - 342119614 Jul 2023
Castrol Edge FS 5W30 Engine Oil A3/B4 5L - 342119614 Jul 2023 EM Voltmètre numérique DC14 Jul 2023
EM Voltmètre numérique DC14 Jul 2023 Vestes et Manteaux pour Femme en Promotion. Nike FR14 Jul 2023
Vestes et Manteaux pour Femme en Promotion. Nike FR14 Jul 2023 Caméra de recul14 Jul 2023
Caméra de recul14 Jul 2023 Saldatore a cartuccia bruciatore Kemper TORNADO con piezo fiamma ossidrica portatile14 Jul 2023
Saldatore a cartuccia bruciatore Kemper TORNADO con piezo fiamma ossidrica portatile14 Jul 2023 Étiquette de sécurité antivol à fente pour cintre européen, crochet d'affichage de magasin, stoplock à fente européenne, diamètre 6mm, frais de port gratuits, 100 pièces, 2 pièces14 Jul 2023
Étiquette de sécurité antivol à fente pour cintre européen, crochet d'affichage de magasin, stoplock à fente européenne, diamètre 6mm, frais de port gratuits, 100 pièces, 2 pièces14 Jul 2023 Petite pochette de rangement14 Jul 2023
Petite pochette de rangement14 Jul 2023 Fire HD 8 review: The best ultracheap tablet - CNET14 Jul 2023
Fire HD 8 review: The best ultracheap tablet - CNET14 Jul 2023 Voiture Tapis de Coffre, pour Mitsubishi Outlander 2016-2022 2023 ImperméAble Couverture Complète Doublure de Coffre Tapis,Coffeestyle14 Jul 2023
Voiture Tapis de Coffre, pour Mitsubishi Outlander 2016-2022 2023 ImperméAble Couverture Complète Doublure de Coffre Tapis,Coffeestyle14 Jul 2023 Oreiller de voyage mousse mémoire mauve14 Jul 2023
Oreiller de voyage mousse mémoire mauve14 Jul 2023