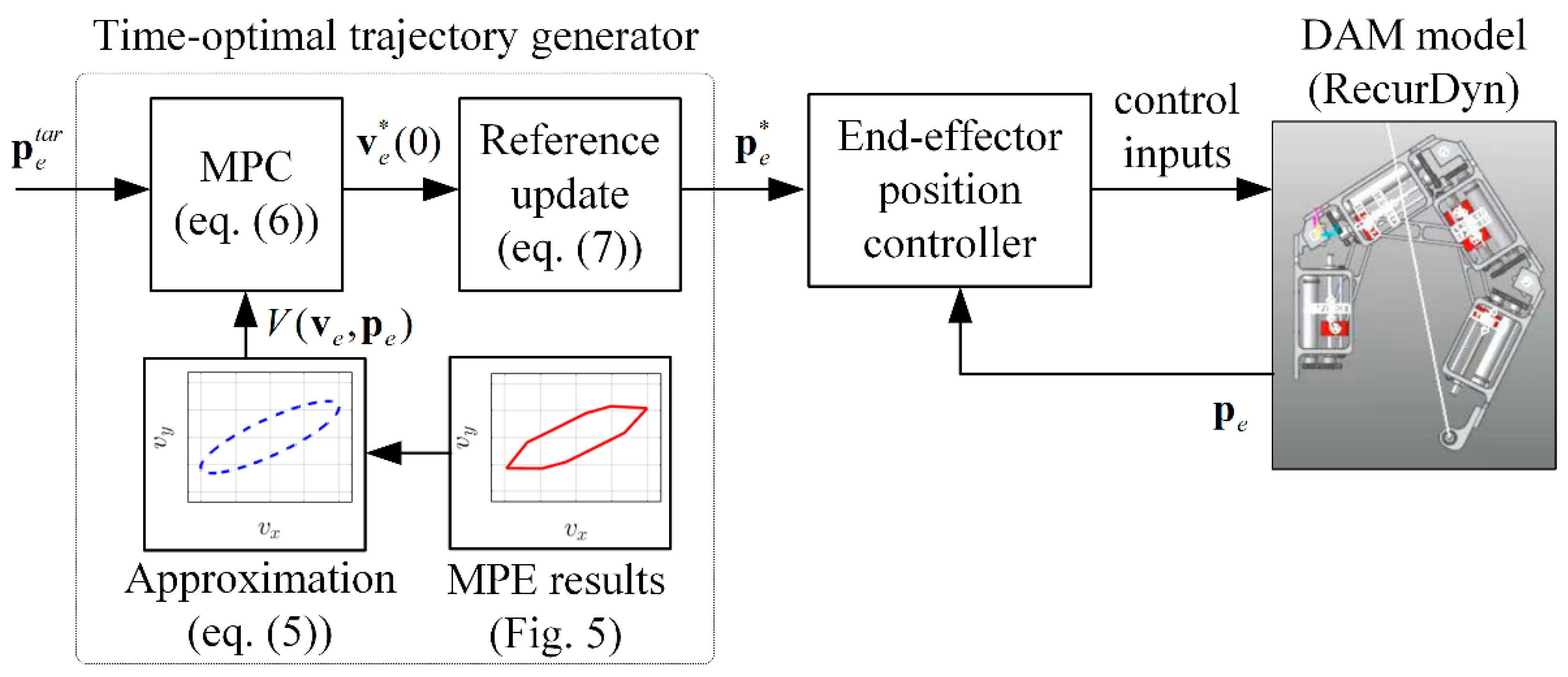
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
Par un écrivain mystérieux
Last updated 16 juillet 2024

We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split the problem into a pla

Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles
PDF) Time-optimal planning for quadrotor waypoint flight

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

A Dual-Layer Network Deep Reinforcement Learning Algorithm for Multi-objective Signal Temporal Logic Tasks

Learning Model Predictive Control for Quadrotors

PDF) Time-optimal planning for quadrotor waypoint flight

Fractional‐order integral terminal sliding‐mode control for perturbed nonlinear systems with application to quadrotors - Labbadi - 2023 - International Journal of Robust and Nonlinear Control - Wiley Online Library
Applied Sciences, Free Full-Text
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
Recommandé pour vous
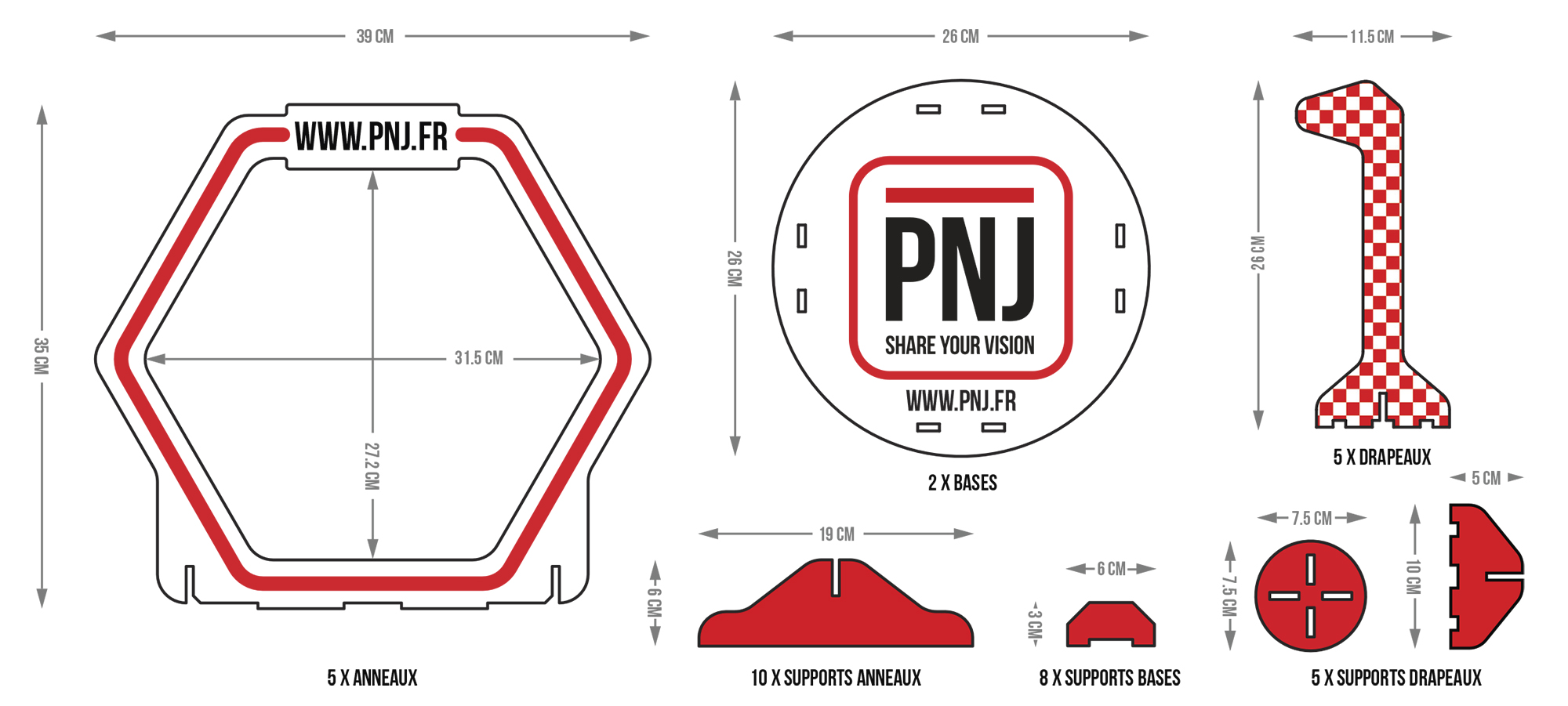 Racing Track PNJ Race Course For Drones14 Jul 2023
Racing Track PNJ Race Course For Drones14 Jul 2023 ANIMATION DRONES Initiation au pilotage et à la course14 Jul 2023
ANIMATION DRONES Initiation au pilotage et à la course14 Jul 2023 Regardez un pilote humain faire une course de drones contre une IA - Numerama14 Jul 2023
Regardez un pilote humain faire une course de drones contre une IA - Numerama14 Jul 2023- LUDyLAB - ➡️ [RÉSERVE TA SESSION DRONE DÈS MAINTENANT SUR 😎 Toi aussi viens au LUDyLAB et deviens dresseur de drones 🛸 Sur un parcours ludique et guidé par un instructeur14 Jul 2023
 Drones et drones terrestres – Red Monkeys14 Jul 2023
Drones et drones terrestres – Red Monkeys14 Jul 2023 Nos parcours de formation Télépilote + spécialisations métiers14 Jul 2023
Nos parcours de formation Télépilote + spécialisations métiers14 Jul 2023 Dimanche 4 juin 2017 : les Champs-Elysées accueillent la seconde édition du Paris Drone Festival - Sciences et Avenir14 Jul 2023
Dimanche 4 juin 2017 : les Champs-Elysées accueillent la seconde édition du Paris Drone Festival - Sciences et Avenir14 Jul 2023 Drone loisir éducatif14 Jul 2023
Drone loisir éducatif14 Jul 2023- Groupe Drone-Ardèche14 Jul 2023
 Projet drone - Icam parcours ouvert14 Jul 2023
Projet drone - Icam parcours ouvert14 Jul 2023


Tu pourrais aussi aimer
 Armoire à balai 2 portes battantes : Commandez sur Techni-Contact - Placard à balai14 Jul 2023
Armoire à balai 2 portes battantes : Commandez sur Techni-Contact - Placard à balai14 Jul 2023 Entretien de ma voiture : comment (bien) utiliser un stylo de retouche14 Jul 2023
Entretien de ma voiture : comment (bien) utiliser un stylo de retouche14 Jul 2023 USB to 3.5mm DC 5V Charger Cable Connector Power Supply Charge14 Jul 2023
USB to 3.5mm DC 5V Charger Cable Connector Power Supply Charge14 Jul 2023 Full HD WIFI surveillance camera accessible remotely14 Jul 2023
Full HD WIFI surveillance camera accessible remotely14 Jul 2023![Kids Case for iPad Pro 11 2022/2021/2020 (4th/3rd/2nd Gen), Techcircle [Support Pencil Charging] Handle Stand Lightweight EVA Foam Bumper Protective](https://m.media-amazon.com/images/I/71-1jWNe5aL.jpg) Kids Case for iPad Pro 11 2022/2021/2020 (4th/3rd/2nd Gen), Techcircle [Support Pencil Charging] Handle Stand Lightweight EVA Foam Bumper Protective14 Jul 2023
Kids Case for iPad Pro 11 2022/2021/2020 (4th/3rd/2nd Gen), Techcircle [Support Pencil Charging] Handle Stand Lightweight EVA Foam Bumper Protective14 Jul 2023 House of Marley Stir It Up Wireless Turntable: Vinyl Record Player with Wireless Bluetooth Connectivity, 2 Speed Belt, Built-in Pre-Amp, and Sustainable Materials : Home & Kitchen14 Jul 2023
House of Marley Stir It Up Wireless Turntable: Vinyl Record Player with Wireless Bluetooth Connectivity, 2 Speed Belt, Built-in Pre-Amp, and Sustainable Materials : Home & Kitchen14 Jul 2023- Studio Bagel - Hot Ones prend des vacances On se14 Jul 2023
 2 roues pivotantes avec tige creuse et plastique de protection14 Jul 2023
2 roues pivotantes avec tige creuse et plastique de protection14 Jul 2023 Acheter Mapa gants de coton 2 pièces ? Maintenant pour € 8.38 chez14 Jul 2023
Acheter Mapa gants de coton 2 pièces ? Maintenant pour € 8.38 chez14 Jul 2023 Bougies chauffe-plats pqt de 614 Jul 2023
Bougies chauffe-plats pqt de 614 Jul 2023
